DDPM 수식 완전 정복: Forward/Reverse Process 직접 유도하기
GAN의 mode collapse 없이 안정적으로 고품질 이미지를 생성하는 DDPM. β schedule부터 loss 함수까지 수식을 하나씩 유도하며 이해합니다.

DDPM: Diffusion 모델의 시작, 노이즈에서 이미지가 탄생하다
TL;DR: DDPM(Denoising Diffusion Probabilistic Model)은 이미지에 노이즈를 점진적으로 추가한 후, 이를 역으로 제거하여 이미지를 생성합니다. 수학적으로 엄밀하면서도 높은 품질의 이미지를 생성하는 혁명적 방법론입니다.
1. Diffusion Model이란?
1.1 생성 모델의 역사
딥러닝 기반 이미지 생성의 역사:
| 년도 | 모델 | 특징 |
|---|---|---|
| 2014 | GAN | Adversarial training, mode collapse 문제 |
| 2014 | VAE | Latent variable, blurry images |
| 2016 | PixelCNN | Autoregressive, 매우 느림 |
| 2019 | Flow | Invertible networks, 메모리 intensive |
| **2020** | **DDPM** | **Diffusion process, 고품질 + 안정적** |
1.2 핵심 아이디어
DDPM의 직관:
"이미지를 완전한 노이즈로 만드는 과정을 학습하고, 그 역과정을 수행하면 노이즈에서 이미지를 생성할 수 있다"
Forward Process (노이즈 추가):
x₀ (원본 이미지) → x₁ → x₂ → ... → x_T (순수 노이즈)
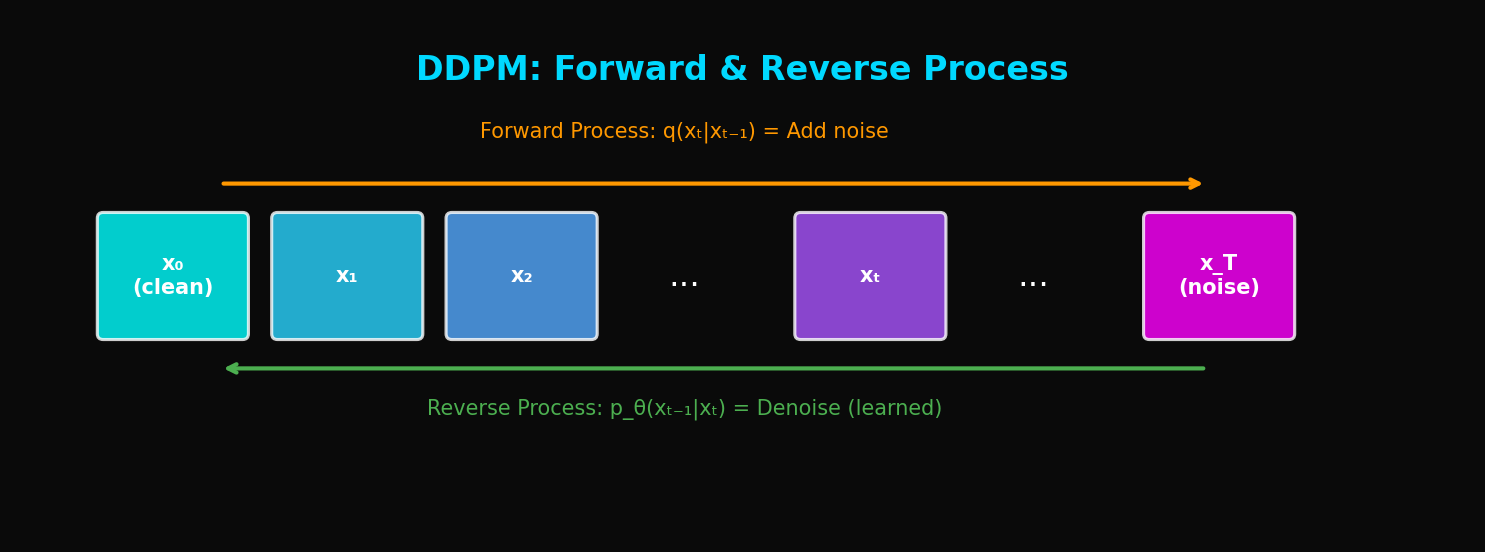
Reverse Process (노이즈 제거):
x_T (순수 노이즈) → x_{T-1} → ... → x₁ → x₀ (생성된 이미지)
1.3 왜 Diffusion인가?
물리학적 비유: 잉크가 물에 확산(diffusion)되는 과정을 생각하세요.
- Forward: 잉크가 물에 퍼져 균일해짐 → 이미지가 노이즈로 변함
- Reverse: 이 과정을 역으로 수행 → 노이즈에서 이미지가 응집
확률적 해석: 복잡한 데이터 분포 를 단순한 분포 와 연결
2. 수학적 기초
2.1 Forward Process (Diffusion)
데이터 에서 시작해 점진적으로 노이즈를 추가:
여기서:
- : variance schedule (보통 에서 로 증가)
- : 총 diffusion steps (보통 1000)
전체 forward process:
2.2 Key Insight: 어떤 시점으로든 직접 이동 가능
, 로 정의하면:
의미: 에서 로 바로 갈 수 있음!
2.3 Reverse Process (Denoising)
Forward process를 역으로:
핵심 질문: 와 를 어떻게 학습할까?
2.4 ELBO (Evidence Lower Bound)
log likelihood의 variational bound:
이를 전개하면:
2.5 Posterior 계산
Bayes' rule을 이용하면:
여기서:
3. 노이즈 예측으로의 재매개변수화
3.1 핵심 통찰
이므로:
따라서 $x_0$를 예측하는 대신 $\epsilon$을 예측하면:
3.2 Simplified Loss
Ho et al.의 논문에서 제안한 간단한 loss:
해석: 네트워크가 추가된 노이즈를 예측하도록 학습
3.3 학습 알고리즘
def train_step(model, x_0):
# 1. 랜덤 timestep 샘플링
t = torch.randint(1, T+1, (batch_size,))
# 2. 노이즈 샘플링
epsilon = torch.randn_like(x_0)
# 3. x_t 계산 (노이즈 추가)
alpha_bar_t = get_alpha_bar(t)
x_t = sqrt(alpha_bar_t) * x_0 + sqrt(1 - alpha_bar_t) * epsilon
# 4. 노이즈 예측
epsilon_pred = model(x_t, t)
# 5. Loss 계산
loss = F.mse_loss(epsilon_pred, epsilon)
return loss4. 샘플링 알고리즘
4.1 기본 샘플링
@torch.no_grad()
def sample(model, shape):
# x_T ~ N(0, I)
x = torch.randn(shape)
for t in reversed(range(1, T+1)):
# 노이즈 예측
epsilon_pred = model(x, t)
# μ_θ 계산
alpha_t = get_alpha(t)
alpha_bar_t = get_alpha_bar(t)
beta_t = get_beta(t)
mu = (1 / sqrt(alpha_t)) * (x - (beta_t / sqrt(1 - alpha_bar_t)) * epsilon_pred)
# 노이즈 추가 (t > 1일 때만)
if t > 1:
sigma = sqrt(beta_t)
x = mu + sigma * torch.randn_like(x)
else:
x = mu
return x4.2 Variance Schedule
Linear Schedule (원본 DDPM):
Cosine Schedule (Improved DDPM):
def cosine_beta_schedule(timesteps, s=0.008):
steps = timesteps + 1
x = torch.linspace(0, timesteps, steps)
alphas_cumprod = torch.cos(((x / timesteps) + s) / (1 + s) * torch.pi * 0.5) ** 2
alphas_cumprod = alphas_cumprod / alphas_cumprod[0]
betas = 1 - (alphas_cumprod[1:] / alphas_cumprod[:-1])
return torch.clip(betas, 0.0001, 0.9999)5. U-Net 아키텍처
5.1 전체 구조
DDPM에서 노이즈 예측 네트워크 는 U-Net 구조:
5.2 Time Embedding
timestep 를 네트워크에 주입:
class SinusoidalPositionEmbeddings(nn.Module):
def __init__(self, dim):
super().__init__()
self.dim = dim
def forward(self, t):
half_dim = self.dim // 2
embeddings = math.log(10000) / (half_dim - 1)
embeddings = torch.exp(torch.arange(half_dim) * -embeddings)
embeddings = t[:, None] * embeddings[None, :]
embeddings = torch.cat((embeddings.sin(), embeddings.cos()), dim=-1)
return embeddings5.3 ResNet Block with Time Conditioning
class ResBlock(nn.Module):
def __init__(self, in_channels, out_channels, time_emb_dim):
super().__init__()
self.time_mlp = nn.Linear(time_emb_dim, out_channels)
self.conv1 = nn.Conv2d(in_channels, out_channels, 3, padding=1)
self.conv2 = nn.Conv2d(out_channels, out_channels, 3, padding=1)
self.norm1 = nn.GroupNorm(8, out_channels)
self.norm2 = nn.GroupNorm(8, out_channels)
if in_channels != out_channels:
self.shortcut = nn.Conv2d(in_channels, out_channels, 1)
else:
self.shortcut = nn.Identity()
def forward(self, x, t_emb):
h = self.conv1(x)
h = self.norm1(h)
h = h + self.time_mlp(t_emb)[:, :, None, None] # Time conditioning
h = F.silu(h)
h = self.conv2(h)
h = self.norm2(h)
h = F.silu(h)
return h + self.shortcut(x)5.4 Self-Attention in U-Net
class SelfAttention(nn.Module):
def __init__(self, channels, num_heads=4):
super().__init__()
self.mha = nn.MultiheadAttention(channels, num_heads, batch_first=True)
self.ln = nn.LayerNorm(channels)
def forward(self, x):
b, c, h, w = x.shape
x = x.view(b, c, h*w).transpose(1, 2) # (B, H*W, C)
x_ln = self.ln(x)
attn_out, _ = self.mha(x_ln, x_ln, x_ln)
x = x + attn_out
return x.transpose(1, 2).view(b, c, h, w)6. 완전한 구현
6.1 U-Net 전체 코드
class UNet(nn.Module):
def __init__(self, in_channels=3, model_channels=64, out_channels=3,
channel_mult=(1, 2, 4, 8), attention_resolutions=(16, 8)):
super().__init__()
self.time_embed = nn.Sequential(
SinusoidalPositionEmbeddings(model_channels),
nn.Linear(model_channels, model_channels * 4),
nn.SiLU(),
nn.Linear(model_channels * 4, model_channels * 4),
)
# Encoder
self.encoder = nn.ModuleList()
ch = model_channels
for level, mult in enumerate(channel_mult):
for _ in range(2):
self.encoder.append(ResBlock(ch, model_channels * mult, model_channels * 4))
ch = model_channels * mult
if level != len(channel_mult) - 1:
self.encoder.append(Downsample(ch))
# Bottleneck
self.bottleneck = nn.Sequential(
ResBlock(ch, ch, model_channels * 4),
SelfAttention(ch),
ResBlock(ch, ch, model_channels * 4),
)
# Decoder
self.decoder = nn.ModuleList()
for level, mult in reversed(list(enumerate(channel_mult))):
for i in range(3):
skip_ch = ch if i == 0 else model_channels * mult
self.decoder.append(ResBlock(ch + skip_ch, model_channels * mult, model_channels * 4))
ch = model_channels * mult
if level != 0:
self.decoder.append(Upsample(ch))
self.out = nn.Sequential(
nn.GroupNorm(8, ch),
nn.SiLU(),
nn.Conv2d(ch, out_channels, 3, padding=1),
)
def forward(self, x, t):
t_emb = self.time_embed(t)
# Encoder with skip connections
skips = []
for module in self.encoder:
if isinstance(module, ResBlock):
x = module(x, t_emb)
skips.append(x)
else: # Downsample
x = module(x)
# Bottleneck
x = self.bottleneck[0](x, t_emb)
x = self.bottleneck[1](x)
x = self.bottleneck[2](x, t_emb)
# Decoder with skip connections
for module in self.decoder:
if isinstance(module, ResBlock):
x = torch.cat([x, skips.pop()], dim=1)
x = module(x, t_emb)
else: # Upsample
x = module(x)
return self.out(x)6.2 DDPM 클래스
class DDPM:
def __init__(self, model, T=1000, beta_start=1e-4, beta_end=0.02):
self.model = model
self.T = T
# Variance schedule
self.betas = torch.linspace(beta_start, beta_end, T)
self.alphas = 1 - self.betas
self.alpha_bars = torch.cumprod(self.alphas, dim=0)
def get_loss(self, x_0):
batch_size = x_0.shape[0]
t = torch.randint(1, self.T + 1, (batch_size,))
epsilon = torch.randn_like(x_0)
alpha_bar = self.alpha_bars[t - 1].view(-1, 1, 1, 1)
x_t = torch.sqrt(alpha_bar) * x_0 + torch.sqrt(1 - alpha_bar) * epsilon
epsilon_pred = self.model(x_t, t)
return F.mse_loss(epsilon_pred, epsilon)
@torch.no_grad()
def sample(self, shape, device):
x = torch.randn(shape, device=device)
for t in tqdm(reversed(range(1, self.T + 1))):
t_batch = torch.full((shape[0],), t, device=device)
epsilon_pred = self.model(x, t_batch)
alpha = self.alphas[t - 1]
alpha_bar = self.alpha_bars[t - 1]
beta = self.betas[t - 1]
mu = (1 / torch.sqrt(alpha)) * (x - (beta / torch.sqrt(1 - alpha_bar)) * epsilon_pred)
if t > 1:
sigma = torch.sqrt(beta)
x = mu + sigma * torch.randn_like(x)
else:
x = mu
return x7. 실험 결과
7.1 CIFAR-10 벤치마크
| Model | FID ↓ | IS ↑ |
|---|---|---|
| GAN (BigGAN) | 14.73 | 9.22 |
| VAE | 78.51 | - |
| PixelCNN | 65.93 | 4.60 |
| **DDPM** | **3.17** | **9.46** |
DDPM이 압도적으로 좋은 FID를 달성!
7.2 샘플 품질
DDPM이 생성한 이미지의 특징:
- 다양성: mode collapse 없이 다양한 샘플
- 디테일: 고해상도에서도 선명한 디테일
- 안정성: 학습이 안정적
7.3 단점: 샘플링 속도
| Model | 샘플링 시간 (1 이미지) |
|---|---|
| GAN | ~0.01초 |
| VAE | ~0.01초 |
| **DDPM (T=1000)** | **~20초** |
1000 스텝을 거쳐야 하므로 매우 느림 → DDIM에서 해결
8. DDPM의 의의와 한계
8.1 혁신적 기여
- 이론적 기반: 확률론적으로 엄밀한 framework
- 학습 안정성: GAN처럼 adversarial training 불필요
- 샘플 품질: SOTA FID 달성
- 다양성: Mode collapse 없음
8.2 한계점
- 느린 샘플링: 1000 steps 필요
- 고해상도 어려움: 픽셀 공간에서 직접 작동
- 조건부 생성 어려움: 기본 모델은 unconditional
8.3 후속 연구 방향
| 문제 | 해결책 | 논문 |
|---|---|---|
| 느린 샘플링 | DDIM | Song et al. 2021 |
| 고해상도 | Latent Diffusion | Rombach et al. 2022 |
| 조건부 생성 | Classifier Guidance | Dhariwal et al. 2021 |
| 더 빠른 샘플링 | Consistency Models | Song et al. 2023 |
9. 코드 실행 예제
9.1 학습
# 설정
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = UNet().to(device)
ddpm = DDPM(model)
optimizer = torch.optim.Adam(model.parameters(), lr=2e-4)
# 학습 루프
for epoch in range(100):
for batch in dataloader:
x_0 = batch[0].to(device)
loss = ddpm.get_loss(x_0)
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(f"Epoch {epoch}: Loss = {loss.item():.4f}")9.2 샘플링
# 샘플 생성
samples = ddpm.sample(shape=(16, 3, 32, 32), device=device)
# 이미지 저장
save_image(samples, 'samples.png', nrow=4, normalize=True)10. 결론
DDPM은 생성 모델의 패러다임을 바꿨습니다:
- 노이즈 추가/제거라는 간단한 아이디어
- 확률론적으로 엄밀한 framework
- GAN을 뛰어넘는 이미지 품질
- 안정적인 학습
하지만 1000 스텝 샘플링이라는 치명적 단점이 있습니다. 다음 글에서는 이를 50 스텝으로 줄이는 DDIM을 다룹니다.
References
- Ho, J., Jain, A., & Abbeel, P. (2020). Denoising Diffusion Probabilistic Models. NeurIPS 2020
- Sohl-Dickstein, J., et al. (2015). Deep Unsupervised Learning using Nonequilibrium Thermodynamics. ICML 2015
- Song, Y., & Ermon, S. (2019). Generative Modeling by Estimating Gradients of the Data Distribution. NeurIPS 2019
- Nichol, A., & Dhariwal, P. (2021). Improved Denoising Diffusion Probabilistic Models. ICML 2021
Tags: #DDPM #Diffusion #생성모델 #딥러닝 #이미지생성 #U-Net #노이즈제거
이 글의 전체 코드는 첨부된 Jupyter Notebook에서 확인할 수 있습니다.
이메일로 받아보기
관련 포스트

SDFT: 자기 증류로 망각 없이 학습하기
복잡한 강화학습 없이, 모델이 스스로를 선생님 삼아 새로운 기술을 배우면서도 기존 능력을 유지하는 방법.

Qwen3-Max-Thinking 스냅샷 공개: 추론형 AI의 새로운 기준
최근 LLM 시장의 트렌드는 단순히 '더 많은 데이터'를 학습하는 것을 넘어, 모델이 '어떻게 생각하느냐'에 집중하고 있습니다. 알리바바 클라우드(Alibaba Cloud)가 자사의 가장 강력한 모델 Qwen3-Max-Thinking의 API 스냅샷(qwen3-max-2026-01-23)을 공개했습니다.

YOLO26: Upgrade or Hype? 완벽 가이드
2026년 1월 출시된 YOLO26의 핵심 기능, YOLO11과의 성능 비교, 그리고 실제 업그레이드 가치가 있는지 실습과 함께 분석합니다.